- Started off reviewing several search algorithms including expansion lists, A*, hybrid A*, dynamic programming and several policy-based search techniques. This was followed up with a thorough and detailed overview of data driven, model based and hybrid prediction techniques for all different objects around the ego vehicle.
- This was followed up with a thorough and detailed overview of data driven, model based and hybrid prediction techniques for all different objects around the ego vehicle.
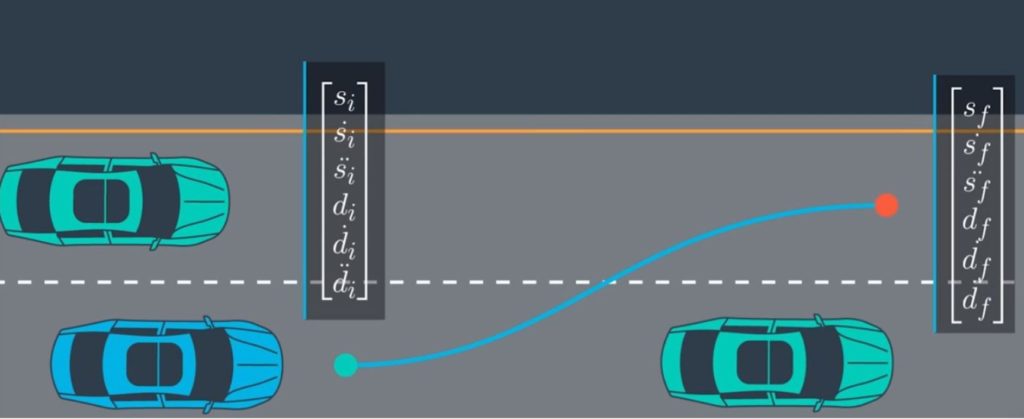
- Behavioral planning on the top level takes all of this information, develops cost functions with associated weights to penalize or reward actions. Jerk minimizing trajectories were analyzed further for lane changes. It was also insightful to gain a thorough understanding of the Frenet coordinate system.
- The goal of the project was to go over a loop of a 6946 m long highway, trying to maintain 50 MPH but also navigating safely, performing lane changes. The ego vehicle successfully manages to complete the loop and continues with zero incidents
- Lanes are enumerated as 0,1 and 2 from left (closest to the solid yellow line) to right. Car x, y, s, d and optimal lane variables are also being captured in the ubuntu bash terminal.