- Thorough analysis of Baye’s rule and law of total probability was analyzed here. Markov assumptions and a 1D markov localization solution was implemented.
- This was followed up with a 2D Particle filter localization solution implemented in this project. Entire project was coded in C++.
- Based on noisy GPS data, first was the initialization step.
- Vehicle states were predicted, map landmarks and observations data were then closely associated with each other and multivariate Gaussian probability density functions were used to update weights and the best particle survived at the end.
- Weighted error is calculated which is also captured in the simulator.
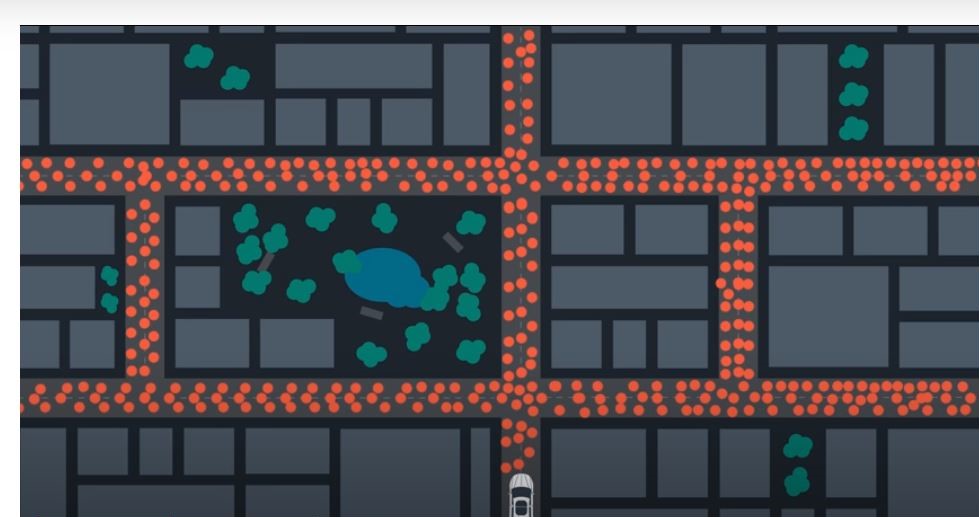
- The X marks are the landmark locations and the blue circle is the localized x, y and theta (yaw) of the vehicle; It stays on top of the ego vehicle throughout the simulation run.
Among all the particles, the best ones survive which help in localizing the ego vehicle.