Worked with the Unity simulator to collect training and test data for training the convolutional neural network
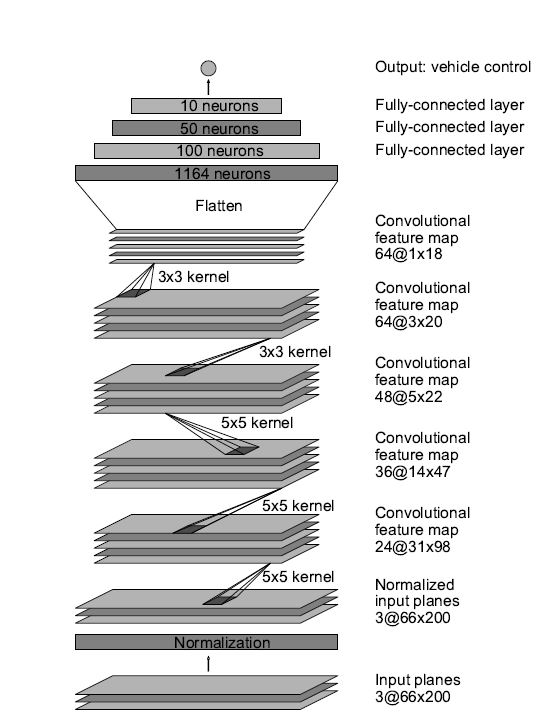
- Built an end to end CNN based out of NVIDIA’s architecture to predict steering angles from images
- Train and validate the model with a training and validation set
- Test that the model successfully drives around track one without leaving the road
Model Architecture is shown below
- Model training was performed using Keras
- Data augmentation was used primarily to improve the dataset
- Left/right/center camera images were augmented to get better steering angles
- Recovery laps were taken into data collection to avoid the vehicle from going too close to the kerb
- Car was driven clockwise and counter clockwise to tackle different turns (left and right turns) in the simulator track




This is a simulation run on my local machine where the vehicle was successfully able to drive through the simulator track after training process. Smooth turns and able to stay within the lane boundaries. This showcases the power of deep learning and an end to end solution proposed by NVIDIA.